-
Die Erfindung betrifft einen Bewegungsmechanismus, insbesondere zur Übertragung von Bewegungen oder Kräften oder zum Führen von Punkten eines Körpers auf bestimmten Bahnen.
-
In der Technik ist eine Vielzahl von Bewegungsmechanismen zur Erzeugung von geforderten Bewegungen bekannt. Je nach den geforderten Bewegungseigenschaften handelt es sich hierbei teilweise um kinematisch sehr komplexe Getriebe.
-
Für Positionieraufgaben reichen häufig schon weniger komplexe Getriebekonstruktionen, um z. B. die Positionierung eines Handhabungsgerätes in einem Arbeitsraum zu gewährleisten. Bei einer Vielzahl von Bewegungsaufgaben kommt es vor allem darauf an, den Aufbau des Getriebes möglichst einfach zu gestalten, um eine kostengünstige Herstellung und einen zuverlässigen Betrieb zu gewährleisten. Auch sind Positioniergenauigkeit und Wiederholbarkeit der Bewegungen von hoher Bedeutung.
-
Aus dem Fachbuch Stölting, H. D./Kallenbach, E. „Handbuch elektrische Kleinantriebe”, Hanser-Verlag, Seite 339 ist ein Kreuzantrieb bekannt, bei dem zwei senkrecht zueinander stehende Zahnradpaare über einen sich tordierenden Zahnriemen in drehender Verbindung miteinander stehen. Eine entsprechende Kinematik eines Winkelgetriebes ist auch aus dem Fachbuch von Thomas Nagel, „Zahnriemengetriebe”, Hanser-Verlag auf Seite 88 bekannt. Anwendungen derartiger Kreuzantriebe sind aber nicht beschrieben.
-
Weiterhin sind aus der
WO 2009/138731 A1 , der
DE 698 13 753 T2 und der
US 3 543 608 A Ausgestaltungen von Bewegungsmechanismen bekannt, die mittels umlaufender endloser Riemen räumlich angeordnete Räder antreiben.
-
Aufgabe der vorliegenden Erfindung ist es daher, einen Bewegungsmechanismus zur Übertragung von Bewegungen oder Kräften oder zum Führen von Punkten eines Körpers auf bestimmten Bahnen zur Verfügung zu stellen, der einfach aufgebaut und mit hoher Zuverlässigkeit zu betreiben ist.
-
Die Lösung der erfindungsgemäßen Aufgabe ergibt sich aus den Merkmalen des Anspruches 1. Weitere vorteilhafte Ausgestaltungen der Erfindung ergeben sich aus den Unteransprüchen.
-
Die Erfindung geht aus von einem Bewegungsmechanismus, insbesondere zur Übertragung von Bewegungen oder Kräften oder zum Führen von Punkten eines Körpers auf bestimmten Bahnen. Bei dem erfindungsgemäßen Bewegungsmechanismus sind auf einer stationären Achse ein Steg mit einem Endbereich und zwei stationäre Räder unabhängig voneinander drehbar gelagert, am gegenüberliegenden Endbereich des Steges ist mindestens eine weitere umlaufende Achse fest an dem Steg und orthogonal zu der stationären Achse angeordnet, auf der umlaufenden Achse sind zwei mit dieser Achse umlaufende Räder unabhängig voneinander drehbar auf der umlaufenden Achse gelagert, über die stationären Räder und die umlaufenden Räder ist ein endloser Riemen, die jeweiligen Räder teilweise umschlingend, derart gespannt, dass der Riemen immer abwechselnd über das erste der stationären Räder, dann über das erste der umlaufenden Räder, dann über das zweite der stationären Räder und über das zweite der umlaufenden Räder wieder zurück zum ersten der stationären Räder läuft. Durch den Aufbau und die Funktionsweise des erfindungsgemäßen Bewegungsmechanismus' ist es möglich, abhängig von der Drehung und der Drehrichtung der stationären Räder die Drehung des Steges oder der umlaufenden Räder direkt zu beeinflussen. Bei einem hinsichtlich des Drehsinnes gleichsinnigen Antreiben der stationären Räder mit vorzugsweise gleich großen Winkelgeschwindigkeiten ergibt sich aufgrund der Kinematik des Bewegungsmechanismus' eine reine Drehung des Stegs ohne Eigendrehung der umlaufenden Räder um die umlaufende Achse. Werden hingegen die stationären Räder hinsichtlich des Drehsinnes gegensinnig angetrieben, insbesondere mit entgegengesetzt gleich großen Winkelgeschwindigkeiten, so resultiert hieraus eine gegenläufige Drehbewegung der umlaufenden Räder auf ihrer zusammen mit dem Steg unbeweglichen Achse, d. h. es bewegen sich nur die umlaufenden Räder ortsfest an dem ebenfalls ortsfesten Steg. Diese beiden Grenzfälle der Bewegung (nur der Steg dreht sich oder nur die umlaufenden Räder drehen sich um den ortsfesten Steg) kann durch Veränderung der Drehrichtungen und der Drehgeschwindigkeiten der beiden stationären Räder zu beliebigen Positionierbewegungen eines Koppelpunktes an den umlaufenden Rädern genutzt werden. So bewegt sich in weiterer Ausgestaltung ein mit einem der umlaufenden Räder fest verbundener Koppelpunkt bei einer beliebigen Drehbewegung der stationären Räder auf einer räumlichen Bahn, wobei die Summe aller möglichen Bahnen des Koppelpunktes die Oberfläche eines Torus ist. Innerhalb dieser Hüllfläche des Torus kann ein mit einem der umlaufenden Räder fest verbundener Koppelpunkt jeden Punkt auf der Hüllfläche des Torus erreichen und so z. B. einen mit einem der umlaufenden Räder verbundenen Gegenstand positionieren. Der Hauptvorteil des Bewegungsmechanismus' ist die Eigenschaft, eine räumliche zweiachsige Bewegung mittels zweier stationärer Antriebe durchführen zu können. Damit ist der erfindungsgemäße Bewegungsmechanismus mit dem Hexapod-Handhabungsgerät vergleichbar, der seine Popularität eben jener Eigenschaft verdankt. Als weiterer Vorteil ist die Linearität des Übertragungsverhaltens hervorzuheben, d. h. der Bewegungsmechanismus ist gleichförmig übersetzend ausgebildet. Die Auslegung einer zugehörigen Steuerung ist dadurch sehr einfach. Der erfindungsgemäße Bewegungsmechanismus besitzt primär als Führungs- bzw. Positioniergetriebe gute Eigenschaften. Hierbei können einerseits die stationären Räder angetrieben werden, um einen oder zwei mit den umlaufenden Rädern fest verbundene Koppelpunkt(e) zu positionieren. Andererseits kann auch ein Koppelpunkt auf seiner räumlichen Koppelfläche geführt und seine jeweilige Position an den Winkelstellungen der stationären Räder abgelesen werden. Ein Einsatz des erfindungsgemäßen Bewegungsmechanismus' ist z. B. in folgenden Bereichen denkbar: Positionieraufgaben, Handhabungsaufgaben, räumlicher Orientierungsausgleich, oszillierende bzw. taumelnde, vollständig umlaufende Drehbewegungen. Ebenfalls ist es denkbar, dass der Bewegungsmechanismus als Leistungsübertragungsgetriebe einsetzbar ist.
-
Von Vorteil ist es, wenn die stationäre Achse in einem Gestell ortsfest gelagert ist. Damit lässt sich der Bewegungsmechanismus stationär verankert aufbauen und damit auch große Lasten oder Gewichte sicher abstützen. Weiterer Vorteil derartiger stationärer Antriebe ist es, dass diese nicht mitbewegt werden müssen, wie es z. B. bei seriellen Achsen üblicher Industrieroboter der Fall ist.
-
In weiterer Ausgestaltung ist es denkbar, dass der Steg auf der stationären Achse etwa mittig angeordnet und beidseitig jeweils von einem stationären Rad umgeben ist. Sowohl der Steg als auch die vorzugsweise beidseitig des Stegs angeordneten stationären Räder sind dabei frei drehbar auf der stationären Achse gelagert, etwa mittels Gleitlagern, Wälzlagern oder dgl. und können sich dadurch unabhängig voneinander und unabhängig von der raumfest angeordneten stationären Achse drehen. Weiterhin ist es denkbar, dass der Steg an der umlaufenden Achse etwa mittig festgelegt und beidseitig jeweils von einem umlaufenden Rad umgeben ist. Der Steg und die umlaufende Achse sind dabei derart aneinander festgelegt, dass eine Relativbewegung von Steg und umlaufender Achse nicht möglich ist. Die vorzugsweise beidseitig des fest an der umlaufenden Achse festgelegten Stegs angeordneten umlaufenden Räder sind hingegen drehbar auf der umlaufenden Achse befestigt, z. B. wiederum über Gleitlager, Wälzlager oder dgl. Lagerungen. Dadurch können sich die umlaufenden Räder relativ zu dem an der umlaufenden Achse festgelegten Steg verdrehen.
-
Besonders einfach ist die Kinematik des erfindungsgemäßen Bewegungsmechanismus', wenn die stationären Räder und die umlaufenden Räder jeweils denselben Durchmesser aufweisen. Dann bewirkt eine Umdrehung eines der stationären Räder genau eine Umdrehung einer der umlaufenden Räder, sofern man möglichen Schlupf aufgrund des Riementriebs vernachlässigt. In anderer Ausgestaltung ist es aber auch denkbar, dass die stationären Räder und die umlaufenden Räder jeweils einen unterschiedlichen Durchmesser aufweisen, so dass zwischen Antriebsdrehung und Abtriebsdrehung eine Übersetzung einstellbar ist. Abhängig von dem Durchmesserverhältnis zwischen stationären Rädern und umlaufenden Rädern ist dabei eine Übersetzung z. B. einer Antriebsdrehung ins Schnelle oder ins Langsame möglich, also eine Übersetzung oder eine Untersetzung.
-
In weiterer Ausgestaltung kann der Riemen ein Rundriemen, ein Flachriemen oder ein Zahnriemen sein.
-
Die konstruktive Ausbildung des erfindungsgemäßen Bewegungsmechanismus' kann zunächst in der Art des Riemens variieren. Der Rundriemen wird während des Betriebs nicht tordiert, was als Vorteil angeführt werden kann. Nachteilig ist der nicht schlupffreie Betrieb. Weitere Riemenvarianten sind der ebenfalls schlupfanfällige Flachriemen, sowie der schlupffreie Zahnriemen. Hier muss der Riemen in den freien Abschnitten zwischen den in Abfolge überlaufenen stationären Rädern und den umlaufenden Rädern jeweils eine Verdrehung um 90° vollführen. Dabei ist besonders bei Zahnriemen auf einen hinreichenden Achsabstand zu achten. Der verwendete Riementrieb bringt weitere Vorteile bei Betriebsgeräuschen, Leichtbau, Schmiermittelfreiheit und Miniaturisierung. Grundsätzlich lässt sich der erfindungsgemäße Bewegungsmechanismus mit allen drei Riemenvarianten betreiben, welche bei unterschiedlichen Einsatzfällen jeweilige Vorteile besitzen. Die Forderung einer hohen Positioniergenauigkeit spricht beispielsweise für den Einsatz von Zahnriemen. Handhabungsvorgänge mit Kraft- oder Momentenbegrenzung dagegen für Flach- oder Rundriemen.
-
In weiterer Ausgestaltung ist es bei Verwendung von Zahnriemen als Riemen denkbar, dass der Zahnriemen zwei zueinander um 90° versetzte Verzahnungen aufweist. Hierdurch kann gewährleistet werden, dass der Zahnriemen nicht tordiert werden muss, um nacheinander in den freien Abschnitten zwischen den in Abfolge überlaufenen stationären Rädern und den umlaufenden Rädern die üblicherweise nur eine Verzahnung eines herkömmlichen Zahnriemens in Eingriff mit den jeweiligen Verzahnungen der Räder zu bringen. Statt dessen kämmen die Verzahnungen der stationären Räder mit einer der beiden Verzahnungen eines derartigen Zahnriemens eines erfindungsgemäßen Bewegungsmechanismus', während die Verzahnungen der umlaufenden Räder mit der dazu senkrecht angeordneten anderen Verzahnung eines derartigen Zahnriemens kämmen. Hierdurch wird verhindert, dass der Zahnriemen tordiert, so dass die Torsionsbelastung eines derartigen Zahnriemens deutlich reduziert oder verhindert wird.
-
In weiterer Ausgestaltung ist es auch denkbar, dass an dem einen Ende des Steges zwei umlaufende Achsen angeordnet sind, die zueinander V-förmig um einen Winkelbetrag versetzt sind. Dabei können weiterhin die umlaufenden Räder jeweils einzeln auf den zwei getrennten Achsen angeordnet sein, die an den zueinander versetzten Enden des Steges an den Enden des Steges festgelegt sind. Die umlaufenden Räder müssen nicht notwendigerweise auf einer gemeinsamen Achse angeordnet sein. Vielmehr können ihre Achsen einen Winkel einschließen. Der Steg nimmt dann eine V-förmige Gestalt an.
-
Weiterhin müssen die umlaufenden Räder nicht um eine mit den stationären Rädern zusammenfallende Achse drehen. Vielmehr kann der Steg sogar ganz wegfallen und eine kardanische Bewegung der nicht stationären Räder realisiert werden. Das Übertragungsverhalten ist in diesem Falle allerdings nicht mehr linear und der Mechanismus verliert seine Eigenschaft der gleichförmigen Übersetzung.
-
Eine besonders bevorzugte Ausführungsform des erfindungsgemäßen Bewegungsmechanismus' zeigt die Zeichnung.
-
Es zeigen:
-
1 – Koordinaten und Winkel eines erfindungsgemäßen Bewegungsmechanismus',
-
2 – Kräfte und Drehmomente eines erfindungsgemäßen Bewegungsmechanismus',
-
3 – grundsätzlicher Aufbau eines erfindungsgemäßen Bewegungsmechanismus' in einer ersten Grundkonfiguration mit einem endlosen Flachriemen und stationären sowie umlaufenden Rädern unterschiedlichen Durchmessers,
-
4 – der erfindungsgemäße Bewegungsmechanismus gemäß 3 mit aus den Bewegungsmöglichkeiten der umlaufenden Räder sich ergebender torusförmiger Bewegungsbahn,
-
5 – der erfindungsgemäße Bewegungsmechanismus gemäß 3 mit angedeuteter Verdrehung allein des Steges bei gleichsinniger Drehung der stationären Räder,
-
6 – der erfindungsgemäße Bewegungsmechanismus gemäß 3 mit einem endlosen Zahnriemen und gezahnten umlaufenden sowie stationären Rädern,
-
7 – eine Ausgestaltung eines erfindungsgemäßen Bewegungsmechanismus' mit stationären sowie umlaufenden Rädern gleichen Durchmessers,
-
8 – der erfindungsgemäße Bewegungsmechanismus gemäß 3 mit an den stationären Rädern und dem Gestell angeordneten Antriebsmotoren,
-
9 – eine andere Ausgestaltung eines erfindungsgemäßen Bewegungsmechanismus', bei dem an einem Ende des Steges zwei umlaufende Achsen angeordnet sind, die zueinander V-förmig um einen Winkelbetrag versetzt sind,
-
10 – eine andere Ausgestaltung eines erfindungsgemäßen Bewegungsmechanismus' mit einer kardanischen Anordnung der stationären Räder an der stationären Achse,
-
11 – schematische Darstellung eines Einsatzbeispiels eines erfindungsgemäßen Bewegungsmechanismus' als Bewegungseinrichtung eines Flugsimulators,
-
12 – schematische Darstellung eines Einsatzbeispiels eines erfindungsgemäßen Bewegungsmechanismus' für das Positionieren und Greifen von Gegenständen mit einem Handhabungsgerät.
-
In den Figuren sind verschiedene Ausgestaltungen des erfindungsgemäßen, im Ganzen mit der Sachnummer 1 bezeichneten Bewegungsmechanismus' dargestellt und beschrieben. Erläuterungen zum Aufbau und zur Funktionsweise des erfindungsgemäßen Bewegungsmechanismus' 1 beziehen sich auf die verschiedenen Varianten des Bewegungsmechanismus' 1, wobei gleiche Sachnummern gleiche Sachverhalte bezeichnen und daher für alle Figuren gelten, sofern nicht ausdrücklich entsprechende Abweichungen beschrieben sind.
-
Anhand von 3 soll im Folgenden der grundsätzliche Aufbau des erfindungsgemäßen Bewegungsmechanismus' 1 beschrieben werden. In der 3 ist der grundsätzliche Aufbau eines erfindungsgemäßen Bewegungsmechanismus' 1 in einer ersten Grundkonfiguration mit einem endlosen Flachriemen 6 und stationären sowie umlaufenden Rädern 4, 2 unterschiedlichen Durchmessers dargestellt. Der Bewegungsmechanismus 1 ist hier schematisch aufgebaut auf einer Grundplatte 9 und einem darauf senkrecht nach oben abstehenden Gestell 8, an dessen oberen Enden die Achse 5 der stationären Räder 4 und des Stegs 7 festgelegt ist. Die stationäre Achse 5 ist selbst drehfest, z. B. in dem Gestell eingeschrumpft oder eingepresst, in dem Gestell 8 gehalten. Steg 7 mit seinem der stationären Achse 5 zugewandten Endbereich 12 und die beidseitig des Steges 7 angeordneten stationären Räder 4 können sich zu der Achse 5 etwa über Wälzlagerungen 10 spielfrei und leichtgängig in Richtung der Drehbewegungen 13 und unabhängig voneinander verdrehen. Die stationären Räder 4 weisen dabei eine Profilform auf, dass ein endloser Flachriemen 6 über die stationären Räder 4 gelegt werden kann.
-
Der im wesentlichen längserstreckte und an der stationären Achse 5 drehbar gelagerte Steg 7 trägt an seinem anderen Endbereich 11 eine weitere umlaufende Achse 3, die allerdings drehfest an dem Endbereich 11 des Steges 7 festgelegt, z. B. in den Steg eingeschrumpft oder eingepresst ist und die Verdrehung 13 um die stationäre Achse 5 herum mitmacht. Beidseitig des von den stationären Rädern 4 weg weisenden Endbereichs 11 des Steges 7 sind zwei umlaufende Räder 2 auf der umlaufenden Achse 3, etwa wieder über Wälzlagerungen 10 unabhängig voneinander drehbar und leichtgängig gelagert. Die umlaufende Achse 3 und die stationäre Achse 5 stehen hierbei orthogonal zueinander und um die Länge des Steges 7 versetzt zueinander.
-
Der Flachriemen 6, der aber auch als Rundriemen oder auch wie in 6 dargestellt als Zahnriemen ausgebildet sein kann, verläuft dabei endlos in der dargestellten Weise über die stationären Räder 4 und die umlaufenden Räder 2, wobei der Flachriemen 6 immer im Wechsel von einem ersten stationären Rad 4 zu einem ersten umlaufenden Rad 2, zu dem zweiten stationären Rad 4 und von da zu dem zweiten umlaufenden Rad 2 und zurück zu dem ersten stationären Rad 4 verläuft. Dabei ist der Flachriemen 7 hinsichtlich seiner Länge derart ausgelegt, dass er unter Spannung an den stationären und umlaufenden Rädern 2, 4 anliegt und damit ein entsprechendes Drehmoment zwischen den Rädern übertragen kann.
-
Die Wirkungsweise des Bewegungsmechanismus' 1 lässt sich nun kurz so beschreieben, dass bei einer gleichsinnigen Drehung beider stationären Räder 4 sich allein der Steg 7 um die stationäre Achse 5 verdreht, wie dies in der 5 als punktierte Darstellung einer verdrehten Anordnung der umlaufenden Räder 2 und des verdrehten Steges 7' angedeutet ist. Die Drehbewegung der stationären Räder 4 wird dabei über den Flachriemen 6 in Laufrichtung 15 des Flachriemens 6 und dann auf die umlaufenden Räder 2 und damit auf den Steg 7 übertragen. Bei einer gegensinnigen Drehung beider stationären Räder 4 hingegen verdrehen sich allein die umlaufenden Räder 2 um die umlaufende Achse 3, der Steg 7 hingegen steht unverändert relativ zu der stationären Achse 5 fest. Es ist damit durch einen entsprechenden Antrieb der stationären Räder 4 möglich, gezielt eine Bewegung eines Punktes an den umlaufenden Rädern 2 zu bewirken, der insgesamt auf einem Torus 27 als Hüllkurve aller derartiger Konfigurationen eines Koppelpunktes liegen kann, der in der 4 um den Bewegungsmechanismus 1 herum punktiert eingezeichnet ist. Der Durchmesser des Querschnittes des Torus 27 entspricht dabei etwa dem Durchmesser der umlaufenden Räder 2, der Radius des Torus dem Abstand der beiden Achsen 3, 5. Innerhalb dieses Torus 27 kann ein Koppelpunkt an den umlaufenden Rädern 2 durch eine Kombination der Drehbewegung 13 jedes der beiden stationären Räder 4 eingestellt werden. Umgekehrt kann bei einer fremd vorgegebenen Bewegung eines Koppelpunktes an den umlaufenden Rädern 2 an der jeweiligen Drehstellung der stationären Räder 4 die jeweilige Lage des Koppelpunktes abgelesen werden.
-
Die Kinematik bzw. die Bewegungscharakteristik und die Belastungsgröße des erfindungsgemäßen Bewegungsmechanismus' 1 sollen nun anhand der 1 und 2 näher analysiert werden.
-
Nach der üblichen Definition eines Getriebes ist der erfindungsgemäße Bewegungsmechanismus 1 in erster Linie ein Führungsgetriebe, obwohl der Einsatz als Übertragungsgetriebe möglich und in bestimmten Einsatzfällen sinnvoll ist. Dies erscheint etwas ungewöhnlich, da doch Riemengetriebe traditionell primär zur Kraft-, Moment- bzw. Leistungsübertragung eingesetzt wurden und werden.
-
Eine Betrachtung des vorliegenden Mechanismus als Übertragungsgetriebe führt zu einer Zuordnung zu gleichförmig übersetzenden Getrieben. Wählt man die Lage der Achsen 3, 5 in den Gelenken des erfindungsgemäßen Bewegungsmechanismus' 1 als Ordnungsmerkmal, so erfolgt eine Zuordnung zu den räumlichen Getrieben im Gegensatz zu ebenen und sphärischen Getrieben. Eine Freiheitsgradbetrachtung des Bewegungsmechanismus' 1 resultiert im Gesamtfreiheitsgrad F = 2. Es liegt also insbesondere kein zwangläufiges Getriebe im früheren Sinne (F = 1) vor. Hinsichtlich der Getriebetopologie liegt eine 6-gliedrige räumliche, geschlossene kinematische Kette vor.
-
Hinsichtlich der Übersetzungsverhältnisse ist unter Bezugnahme auf
1 folgendes anzumerken:
Wenn gemäß
1 die Winkel φ
1 und φ
2 vorgegeben sind, ergeben sich für die Winkel ψ und θ die linearen Abhängigkeiten
welche als Übersetzungsverhältnisse interpretiert werden können. Wegen der Linearität der Winkelabhängigkeiten ist der Bewegungsmechanismus
1 ein gleichförmig übersetzendes Getriebe.
-
Wegen des Freiheitsgrades F = 2 bewegt sich ein mit einem der umlaufenden Räder 2 fest verbundener Punkt p auf einer räumlichen Fläche. Diese Fläche ist die Oberfläche des Torus 27.
-
Die Funktion der Koppelfläche ergibt sich aus der mathematischen Gleichung des zugehörigen Torus
27 und führt hier unter Beachtung der Beziehungen (1) und (2) zur Koppelflächengleichung
mit dem vereinbarten Koordinatensystem gemäß
1. Für den Sonderfall R = r gilt
-
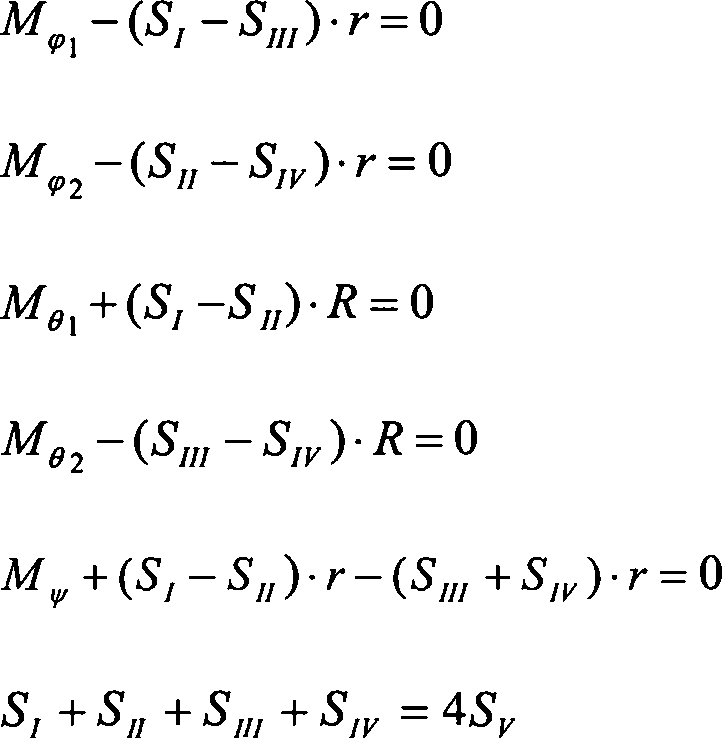
Hinsichtlich der Kräfte und Momente an dem erfindungsgemäßen Bewegungsmechanismus 1 ist unter Bezugnahme auf 2 folgendes anzumerken:
In einer einfachen Betrachtung werden die Kräfte in den Abschnitten des Riemens 6 sowie die notwendigen Momente in den angetriebenen stationären Rädern 4 untersucht. Hierzu wird ein quasistatischer Zustand angenommen, weswegen dynamische Kräfte und Massenträgheiten nicht berücksichtigt werden. Weiterhin bleiben Schwerkraft- und Reibungseinflüsse außerhalb der Betrachtung.
-
Als vorgegebene äußere Belastungen wirken die Momente MΘ1, MΘ2 auf die umlaufenden Räder sowie das Stegmoment MΨ. Der Riemen 6 wird hier nach Konvention der Mechanik als Seil aufgefasst. In jedem der freien Seilabschnitte I, II, III und IV wirkt zunächst bei unbelastetem Mechanismus eine Vorspannkraft SV.
-
Die Gleichgewichtsbedingungen für die vier Räder
2 und
4, den Steg
7 und den Riemen/Seil
6 lauten
-
Hieraus ergeben sich die notwendigen Antriebsmomente
-
-
Der erfindungsgemäße Bewegungsmechanismus 1 erlaubt aufgrund seiner Bewegungscharakteristik damit eine Konstruktion eines mechanisch einfach aufgebauten und aufgrund der Linearität der Bewegungen auch einfach zu steuernden Getriebes, bei dem allein über die relative Verdrehung der stationären Räder 4 zueinander die Bewegung der umlaufenden Räder beeinflusst werden kann. Dies lässt sich in einer Vielzahl technischer Realisierungen praktisch ausnutzen.
-
Dabei kann der erfindungsgemäße Bewegungsmechanismus 1 in seinem bisher beschriebenen prinzipiellen Aufbau vielfach variiert werden.
-
So ist z. B. in der 6 der erfindungsgemäße Bewegungsmechanismus 1 gemäß 3 mit einem endlosen Zahnriemen 17 und gezahnten umlaufenden sowie stationären Rädern 2, 4 ausgebildet, wodurch bei grundsätzlich gleichartigem Aufbau und gleichartiger Funktionsweise ein Schlupf der Übertragung der Bewegung durch den Zahnriemen 17 zwischen den stationären Rädern 4 und den umlaufenden Rädern 2 verhindert werden kann. Nachteilig an dieser Ausgestaltung ist die beim Überlaufen der stationären Räder und der umlaufenden Räder notwendige Torsion des Zahnriemens 17, wodurch ein entsprechender Achsabstand a zwischen stationärer Achse 5 und umlaufender Achse 3 notwendig ist. Eine andere Möglichkeit zur Vermeidung dieser Torsion besteht darin, dass ein nicht dargestellter Zahnriemen 17 mit zwei orthogonal zueinander versetzten Verzahnungen verwendet wird, wobei die eine Verzahnung nur mit den stationären Rädern 4 und die andere Verzahnung nur mit den umlaufenden Rädern 2 kämmt.
-
Besonders einfach lässt sich der erfindungsgemäße Bewegungsmechanismus 1 aufbauen, wenn wie in 7 dargestellt der Bewegungsmechanismus 1 mit stationären sowie umlaufenden Rädern gleichen Durchmessers ausgestaltet wird. Hierdurch ist die Übertragungsfunktion des Bewegungsmechanismus' 1 besonders einfach. Bei anderen Durchmessern von stationären Rädern 4 und umlaufenden Rädern 2 lassen sich entsprechende Übersetzungen oder Untersetzungen der Bewegung realisieren.
-
In der 8 ist eine praktische Umsetzung des erfindungsgemäßen Bewegungsmechanismus' 1 gemäß 3 mit an den stationären Rädern 4 und dem Gestell 8 angeordneten Antriebsmotoren 18 dargestellt, so dass sich die Drehung der stationären Räder 4 über die Antriebsmotoren 18 steuern lässt. Hierzu ist je ein Antriebsmotor 18 ortsfest an den beiden Stützen des Gestells 8 festgelegt und an seinem Abtriebsritzel über einen Antriebsriemen 19 mit einem entsprechenden Abschnitt des jeweiligen stationären Rades 4 drehbar verbunden. Eine Drehbewegung des Antriebsmotors 18 wird über den Antriebsriemen 19 auf das jeweilige stationäre Rad 4 übertragen. Die Drehzahl und die Drehrichtung des Antriebsmotors 18 wird über eine nicht weiter dargestellte Steuereinrichtung vorgegeben.
-
Werden die beiden Antriebsmotoren nun so angesteuert, dass sich die stationären Räder 4 gleichsinnig und gleich schnell drehen, so ergibt sich wie schon beschrieben eine reine Drehung des Steges 7, ohne dass die umlaufenden Räder 2 sich selbst drehen. Eine gegensinnige und entgegengesetzt gleich schnelle Drehung der stationären Räder 4 verursacht dann eine gegenläufige Drehbewegung der umlaufenden Räder 2 auf ihrer nun mit dem Steg 7 unbeweglichen umlaufenden Achse 3. Bei unterschiedlichen Drehgeschwindigkeiten der stationären Räder 4 lassen sich Mischformen bzw. Überlagerungen dieser grundlegenden Bewegungen erzeugen.
-
In der 9 ist eine andere Ausgestaltung eines erfindungsgemäßen Bewegungsmechanismus' 1 dargestellt, bei dem an Endbereichen 11, 11' des Steges 7 nicht nur eine umlaufende Achse 3, sondern zwei umlaufende Achsen 3, 3' angeordnet sind, die zueinander V-förmig um einen Winkelbetrag versetzt sind. Hierzu ist der Steg 7 selbst ebenfalls V-förmig ausgebildet, so dass auf einem gemeinsamen Endbereich 12 im Bereich der stationären Räder 4 zwei Arme des Steges 7 ausgebildet sind, die zueinander V-förmig verdreht angeordnet sind. Hierdurch sind auch die in diesen Endbereichen 11, 11' fest angeordneten umlaufenden Achsen 3, 3' und damit die beiden umlaufenden Räder 2 um diesen Winkel verschwenkt zueinander angeordnet und führen abhängig von der Antriebsweise der stationären Räder 4 räumlich unterschiedliche Drehungen 14, 14' um ihre jeweiligen umlaufenden Achsen 3, 3' aus.
-
In der 10 ist nun eine andere Ausgestaltung eines erfindungsgemäßen Bewegungsmechanismus' 1 mit einer kardanischen Anordnung der stationären Räder 4 an der stationären Achse 5 dargestellt, die einen kinematischen Grenzfall des Bewegungsmechanismus' 1 darstellt. Hierbei verlaufen die beiden Achsen 3, 5 parallel zueinander, so dass sie sich nicht schneiden können. Auf der stationären Achse 5 ist nun eine zu der stationären Achse 5 senkrechte Achse 20 festgelegt, auf der dann wiederum die stationären Räder 4 drehbar gelagert sind. Hierdurch stehen die stationären Räder 4 und die umlaufenden Räder 2 wieder senkrecht zueinander und bilden eine Art kardanische Aufhängung. Der Steg 7 kann bei dieser Anordnung vollständig entfallen. Es sei noch darauf hingewiesen, dass bei dieser Ausgestaltung der Riemen 6 als Rundriemen ausgebildet ist, so dass eine Torsionsbelastung des Rundriemens 6 nicht auftritt.
-
In der 11 ist in einer sehr schematischen Darstellung ein Einsatzbeispiel eines erfindungsgemäßen Bewegungsmechanismus' 1 als Bewegungseinrichtung eines Flugsimulators dargestellt. Ein Flugsimulator mit mitbewegter Pilotenkanzel, hier symbolisiert durch ein Flugzeug 21, vermittelt den übenden Piloten neben dem optischen Eindruck insbesondere auch einen Eindruck von der räumlichen Auswirkung von Flugbewegungen, da hierbei bisher mit aufwändigen hydraulischen Einrichtungen die Pilotenkanzel mechanisch entsprechend den ausgeführten Flugbewegungen synchron gekippt und verschwenkt wird. Der erfindungsgemäße Bewegungsmechanismus' 1 eignet sich für die Ausführung derartiger Kipp- und Schwenkbewegungen besonders gut, da die Bewegungscharakteristik derartiger Kipp- und Schwenkbewegungen sich innerhalb des Torus 27 befindet, die von dem erfindungsgemäßen Bewegungsmechanismus' 1 einfach und zuverlässig und vor allem mit geringem mechanischen Aufwand ausgeführt werden kann.
-
Ein anderes schematisch dargestelltes Beispiel für die Anwendung eines erfindungsgemäßen Bewegungsmechanismus' 1 ist in der 12 für das Positionieren und Greifen von Gegenständen 24 mit einem Handhabungsgerät 22 dargestellt. Der an sich schon ausführlich beschriebene Bewegungsmechanismus' 1 wird hierbei so modifiziert, dass ein besonders langer Steg 7 für eine große Greiflänge um die stationäre Achse 5 durch die Antriebsmotoren 18 und eine gleichsinnige Drehbewegung 13 beider stationärer Räder 4 gedreht wird, wodurch eine reine Schwenkbewegung 25 des Steges bewirkt wird (linkes Teilbild der 12). Durch die Veränderung der Drehrichtung der beiden Antriebsmotoren 18 kann dann auch die Bewegungsrichtung der Schwenkbewegung 25 des Steges 7 umgedreht werden.
-
Das Greifen des Gegenstandes 24 erfolgt hierbei durch zwei Greifbacken 23 der Handhabungseinrichtung 22, die jeweils auf einem der beiden umlaufenden Räder 2 festgelegt sind. Durch eine rein gegensinnige Drehbewegung der beiden stationären Räder 4 durch die Antriebsmotoren 18 kann durch die vorstehend beschriebene Schwenkbewegung des Steges 7 der Gegenstand 24 durch die Greifbacken 23 gegriffen werden, indem die beiden umlaufenden Räder betätigt und die Greifbacken 23 aufeinander zu bewegt werden. Umgekehrt kann durch Änderung der Drehrichtung der beiden stationären Räder 4 der Greifer durch Auseinanderfahren der Greifbacken wieder geöffnet werden. Hierdurch sind alle wesentlichen Funktionen einer Handhabungseinrichtung 22 durch die Modifikation des erfindungsgemäßen Bewegungsmechanismus' 1 gewährleistet.
-
Bezugszeichenliste
-
- 1
- Bewegungsmechanismus
- 2
- umlaufende Räder
- 3
- umlaufende Achse
- 4
- stationäre Räder
- 5
- stationäre Achse
- 6
- Flachriemen
- 7
- Steg
- 8
- Gestell
- 9
- Grundplatte
- 10
- Wälzlagerung
- 11
- Endbereich Steg zu umlaufenden Rädern
- 12
- Endbereich Steg zu stationären Rädern
- 13
- Drehbewegung um die stationäre Achse
- 14
- Drehbewegung um die umlaufende Achse
- 15
- Umlaufrichtung Flachriemen
- 16
- Verzahnung
- 17
- Zahnriemen
- 18
- Antriebsmotoren
- 19
- Antriebsriemen
- 20
- Achse
- 21
- Flugsimulator
- 22
- Handhabungseinrichtung
- 23
- Greiferbacken
- 24
- Gegenstand
- 25
- Bewegungsbahn Rotation
- 26
- Bewegung Öffnen/Schließen
- 27
- Torus













 mit dem vereinbarten Koordinatensystem gemäß
mit dem vereinbarten Koordinatensystem gemäß